7.1 MoE原理解析
MoE原理¶
学习目标¶
- 理解MoE原理.
框架选择¶
- 引入MoE并行训练的框架有很多, 为什么这篇文章选择用DeepSpeed来做讲解呢? 主要原因如下:
- 使用DeepSpeed做讲解时, 可将其MoE实现作为主线, 其余框架MoE实现作为分支, 这样方便在讲解主线的同时, 引入分支进行对比. 之所以DeepSpeed能成为主线, 是因为它的MoE代码是一个"大杂汇", 例如, 它的MoE初始化设置借鉴了Megatron, 它的MoE-Layer架构借鉴了Fairscale, 它的MoE优化方式借鉴了Tutel等, 在这些借鉴之上, 它引入了自己的一些改进. 所以使用DeepSpeed, 更方便我们做对比讲解.
- DeepSpeed的MoE模型架构是Gshard, 作为最早将MoE应用在Transformer上的模型, Gshard提出的框架和思想一直影响至今. 后续我们看到的很多LLM MoE的架构改进, 其实都是在Gshard的这一套逻辑上做的迭代, 比如loss改造, topKexpert的选择, 稀疏矩阵计算优化等等. 所以从Gshard入手, 更利于我们对基础的把握.
Gshard架构¶
MoE设计思想¶
- 首先来看MoE架构图, 如下图所示:
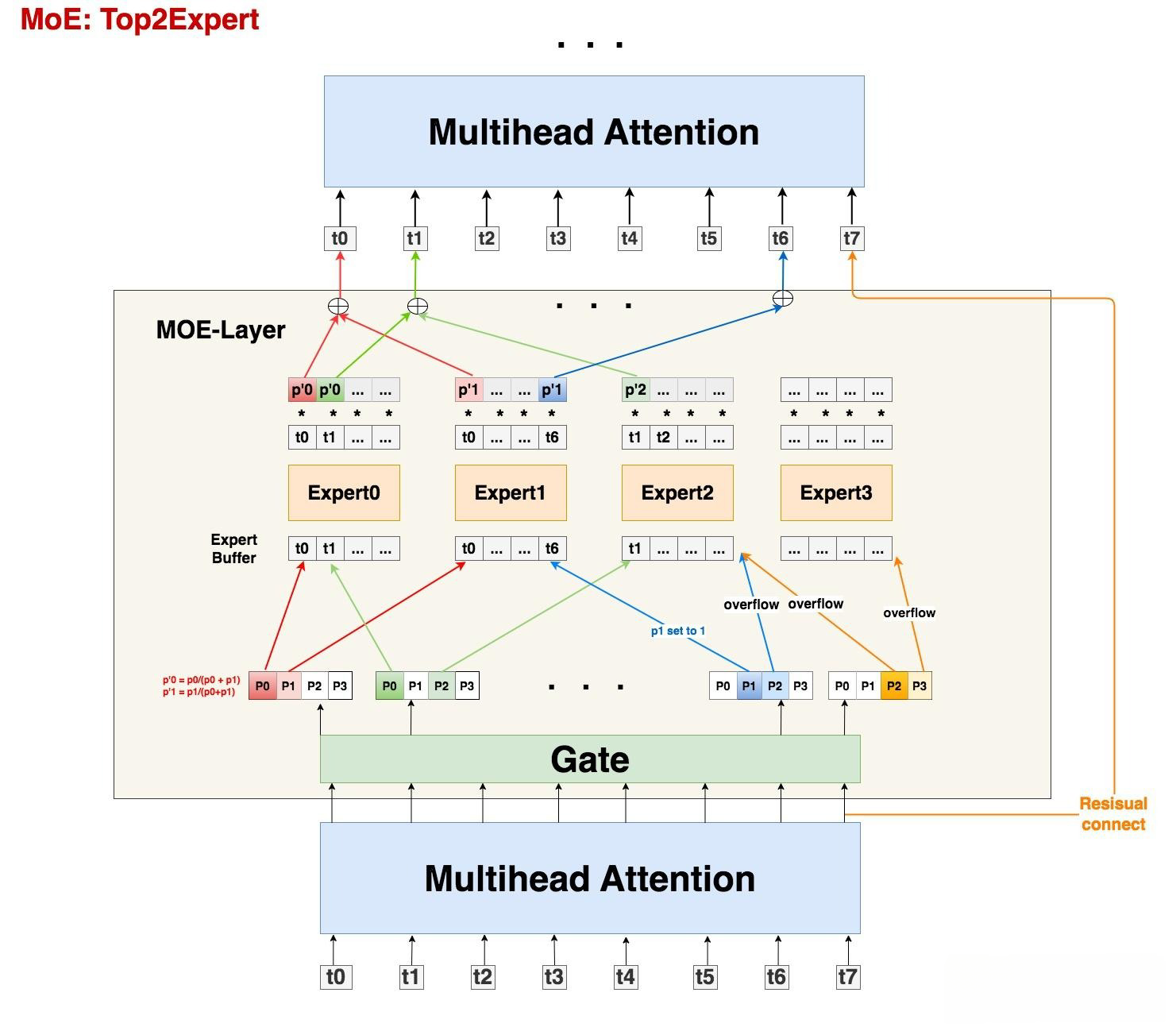
- 从架构图中我们可以发现, MoE其实就是将Transformer中的FFN层替换成了MoE-layer, 其中每个MoE-Layer由一个gate和若干个experts组成. 这里gate和每个expert都可以理解成是nn.linear形式的神经网络.
- 这样设计的直觉是什么呢?
- expert: 术业有专攻. 假设我的输入数据是"我爱吃炸鸡", 在原始的Transformer中, 我们把这5个token送去一个FFN层做处理. 但是现在我们发现这句话从结构上可以拆成"主语-我", "谓语-爱吃", "宾语-炸鸡", 秉持着术业有专攻的原则, 我把原来的1个FFN拆分成若干个expert, 分别用来单独解析"主语", "谓语", "宾语", 这样可能会达到更好的效果.
- gate: 那么我怎么知道要把哪个token送去哪个expert呢? 很简单, 我再训练一个gate神经网络, 让它帮我判断就好了.
- 当然, 这里并不是说expert就是用来解析主谓宾, 只是举一个例子说明: 不同token代表的含义不一样, 因此我们可以用不同expert来对它们做解析. 除了训练上也许能达到更好的效果外, MoE还能帮助我们在扩大模型规模的同时保证计算量是非线性增加的(因为每个token只用过topK个expert, 不用过全量expert), 这也是我们说MoE-layer是稀疏层的原因.
- 最后需要注意的是, 在之前的表述中, 我们说expert是从FFN层转变而来的, 这很容易让人错理解成expert就是对FFN的平均切分, 实际上你可以任意指定每个expert的大小, 每个expert甚至可以>=原来单个FFN层, 这并不会改变MoE的核心思想: token只发去部分expert时的计算量会小于它发去所有expert的计算量.
输入数据¶
- 首先, 所有tokens正常过Attention层得到MoE-layer的输入, 我们记输入数据的尺寸为(S, M), 其中:
- S : 输入batch中的token数量, 例如图中S=8
- M: token_embedding维度
- 需要注意的是, 我们一般是以batch的形式组织输入数据的(图中batch_size = 1), 假设Attention层输入数据的维度是(batch_size, seq_len, M), 那么有S = batch_size * seq_len
Gate¶
- 接下来, 我们就要使用线形层Gate帮助我们判断token应该送去哪个expert了. 在别的MoE架构中, Gate有时也被称为Router(路由). Gate的尺寸大小为(M, E), 其中E表示expert的数量.
- 输入数据(S, M)过Gate(M, E)后, 得到prob数据(S, E), 它的含义是: 每个token去向每个expert的概率. 由于在Gshard中我们使用的是top2Expert, 因此对每个token, 我们只关心它概率最大的两个expert. 在图中, 我们用深色表示最大概率, 浅色表示次大概率. 例如对token0来说, 它被送去expert0的概率最大, 被送去expert1的概率次大.
- 现在既然知道每个token的top2Expert了, 是不是就可以直接发送了呢? 别急, 我们先来看看Expert的架构.
Expert¶
- 我们知道, token发去expert的概率不是我们能控制的, 在实际操作中, 可能某些expert接收到了好多token, 而某些expert接收的token寥寥无几, 我们管这种现象叫expert负载不均. 这种情况不仅不符合我们MoE的设计初衷(术业有专攻), 还影响计算效率(例如引起分布式训练中各卡通讯时的负载不均), 所以我们急需想办法缓解这种问题, Gshard就提出了以下几种解决办法:
- 1: capacity和capacity factor
- 2: Random Routing
- 3: Auxiliary Loss
capacity和capacity factor¶
- 在架构图中, 你会看到一个叫Expert buffer的东西, 这是什么呢?
- 在上文中我们提到, 有些expert可能接收到非常多的token, 为了缓解这个问题, 我们可以给每个expert设置一个容量值(capacity), 如果当前这个expert接收到的token数已经超过了容量, 那么它就不再接收token了, 此时我们称这个多出来的token为溢出(overflow).
- 那么容量应该怎么设置呢? 在我们的例子中, 一共有8个token和4个expert, 在理想的负载均衡的情况下, 每个expert应该接收8/4 = 2个token, 考虑到这里采用的是top2Expert, 因此最终每个expert接收的token上限最好是(8/4)*2 = 4, 这也是我们图中expert buffer的长度.
- 但这并不说明capacity一定要是(S/E)*K. 我们可以在此基础上使用capacity factor, 根据需要让每个expert多处理或少处理一些token; 你甚至还能设置一个容量下界(min_capacity), 所以最终capacity可以按如下式子定义:

- 回到图中的例子上来, 我们发现t0和t1都正常发去top2Expert上了. 但是对于t6, 它的2nd expert已经装满了; 对于t7, 它的1st和2nd expert都满了. 所以t6和t7都发生了溢出. 那么我们要怎么处理溢出的情况? 后续部分详解!
Random Routing¶
- 对于一个token, 我们一定要把它发到top2Expert上吗?
- 从直觉上对于每个token, 我们最好将其以100%的概率发去1st expert; 但是对于它的2nd expert, 我们可以不100%发送, 而是以一定的概率(例如从uniform(0,1)中随机抽取一个数p, 将其作为概率)发送, 这样不就能节省对expert capacity的消耗, 从而更好利用每个expert吗? 这也是Gshard论文中提出的方法.
- 我们下文要讲的DeepSpeed代码, 在这一块又做了稍微不同的处理: 以图中t0为例, 1st expert它是肯定要发去的. 但是在选择2nd expert时, 它做了一些加噪处理: 对产出的每个概率(更确切地说是logit), 它从某种分布中采样4个噪声, 加在这4个logit上, 然后mask掉1st expert位置的logit, 再从剩下3个logit中找到最大的作为其2nd Expert.
- 现在我们已经选出最终的top2Expert, 我们再回到没有加噪时的4个概率上, 取出相应位置的概率, 做normalize计算, 如下图所示:

- P0', P1'是一种权重(weight), 该token过expert0和expert1后会分别得到一个输出token, 我们可以对2个输出token做加权计算, 得到最终的输出token.
- 回到上面的问题, token发生溢出时, 要怎么办呢?
- 1: 如果只有单个expert溢出, 那么就把另一个expert的权重值为1, 然后正常参与加权计算(如图中t6).
- 2: 如果2个expert都溢出, 那么该token就不经过任何expert, 直接通过残差连接的方式, 原样发去下一层的Attention上(如图中t7).
Auxiliary Loss¶
- 除了capacity和random routing外, Gshard还通过增加一项辅助损失函数(Auxiliary Loss)来尽量保证Expert的负载均衡, 其定义如下所示:

- 参数解析:
- E: 专家数量
- Ce: 某个专家的buffer中已经存下的token数量(一般指该专家作为1st专家时接收到的token数)
- S: 总token数量
- me: 某个专家的buffer中已经存下的token在该专家上的avg(weight)(token考虑范围也是那些将该专家作为1st专家的token).
- 我们将这个辅助损失添加在正常loss之后, 我们的目标也是最小化这个辅助损失. 这个辅助损失设计已经非常直觉, 就不过多阐述了. 值得一提的是, 之所以引入me项, 是为了让辅助损失函数可以backward求导(因为只考虑Ce/S这项, 它受制于argmax, 是不可求导的, 实在难理解也没关系, 记住就好).
- 阶段性总结:
- 首先, 我们有一串过Attention层后的token序列.
- 我们通过Gate, 计算每个token去往每个expert的概率.
- 我们希望不同expert处理的token数尽量均衡, 所以我们同时采取三方面优化:
- Capacity: 为每个expert设置capacity(expert buffer), 限制它能处理的最大token数量, 多出来的token算为溢出, 在top2Expert都溢出的情况下, 该token会被直接发去下一层attention.
- Random Routing: 每个token一定会被发去1st Expert, 在此基础上我们通过random routing加噪的方式, 重新选出2nd expert. 在做完capacity + random routing后, 我们最终确认了每个token要发去的top2expert和其对应的权重, 通过加权计算的方式, 确认MoE-Layer最终的输出结果.
- Auxiliary Loss: 添加辅助损失函数, 对expert负载不均的情况做进一步惩罚.
Zero Padding & Drop tokens¶
Zero Padding¶
- 我们上述的优化方法, 只能"缓解"负载不均, 而不能保证解决负载不均. 也就是说, 存在一些Expert, 它的Expert buffer没有填满, 这可怎么办呢?

- 最直接的方法, 就是在没有buffer中空出来的位置, 用0向量填充, 我们称为Zero padding. 更具体地说, 最终每个expert上的输入数据维度为(E, C, M), 其中C表示capacity. 0填充的好处是, 我们保证每个expert上要处理的输入数据维度是一样的, 这有利于硬件层面的后续处理(例如多卡通讯间的负载均衡等).
Drop tokens¶
- 我们知道, 当发生溢出情况时, 不是所有token都会被expert正常处理的, 我们称这种对溢出的操作为drop tokens. 如果被drop掉的tokens数量太多, 也是一种信息损失(它们都没经过任何expert解析), 我们当然可以通过调整capacity来缓解这个问题, 但过大的capacity会引起更严重的zero padding问题(影响到矩阵的稀疏程度), 所以这也是后续一些MoE模型架构侧重的优化.
代码¶
- 将上述流程, 以Gshard论文中提供的伪代码给出, 按照DeepSpeed的实现方式做了修正:
# -------------------------------------------------------------------------------------
# 1. 通过gate, 计算每个token去到每个expert的概率
#
# [input]: Attention层输出的一整个batch的token, 其尺寸为(seq_len, batch_size, M),
# 其中M表示token_embedding
# [reshaped_input]: 由input做reshape而来, 尺寸为(S, M), 其中S = seq_len * batch_size
# [Wg]: gate的权重, 尺寸为(M, E), 其中E表示MoE-layer层的专家总数
# [gates]: 每个token去到每个expert的概率, 尺寸为(S, E)
# -------------------------------------------------------------------------------------
M = input.shape[-1]
reshape_input = input.reshape(-1, M)
gates = softmax(enisum("SM, ME -> SE"), reshape_input, Wg)
# -------------------------------------------------------------------------------------
# 2. 确定每个token最终要去的top2Expert, 并返回对应的weight和mask
#
# [combine_weights]: 尺寸为(S, E, C), 其中C表示capacity (Expert buffer)
# 表示对每个token(S)而言, 它对每个专家(E)的weight, 而这个weight按照
# 该token在buffer中的位置(C)存放, 不是目标位置的地方则用0填充
# 例如图中token1, 它将被发送到expert0和expert2, 且它在expert0的buffer中排在
# 1号位置, 在expert2中排在0号位置, 那么token1的combine_weights就是:
# [[0., p0, 0., 0.],
# [0. , 0., 0., 0.],
# [p2, 0., 0., 0.],
# [0., 0., 0., 0.]]
# 最后再复习一下weight和gates所表示的prob的区别: 前者是在后者基础上,
# 做了random + normalize, 确定最终的top2Expert后返回的对应结果
#
# [dispatch_mask]: 尺寸为(S, E, C), 它等于combine_weights.bool(), 也就是对combine_weights
# 为0的地方设为False, 为1的地方设为True.
# dispatch_mask后续将被用在zero padding上
# -------------------------------------------------------------------------------------
# (S, E, C) (S, E, C)
combine_weights, dispatch_mask = Top2Gating(gates)
# -------------------------------------------------------------------------------------
# 3. 将输入数据按照expert的顺序排好, 为下一步送去expert计算做准备(很重要)
#
# [dispatch_mask]: 尺寸为(S, E, C)
# [reshape_input]: 尺寸为(S, M)
# [dispatched_expert_input]: 本步的输出结果, 表示按专家排序好的输入数据, 尺寸为(E, C, M)
# 这个结果表示, 每个专家(E)的buffer(C)下要处理的token_embedding(M),
# 例如dispatched_expert_input[0]就表示expert0 buffer中的情况
# 注意:
# 1: 每个专家buffer中的token是按顺序排列好的,
# 回到图中的例子, expert0 buffer下0号位置排的是token0,
# 3号位置排的是token6, 以此类推. dispatch_mask就起到了维护这种顺序的作用
# 2: 当对应专家接收的token数不足buffer长度C时, 不足的地方用0向量填充.
# -------------------------------------------------------------------------------------
dispatched_expert_input = einsum("SEC, SM -> ECM", dispatched_mask, reshape_input)
# -------------------------------------------------------------------------------------
# 4. 将排序好的input送入expert进行计算.
# 同正常的FFN层一样, 每个expert也由2个线形层Wi, Wo组成
# [dispatched_expert_input]: 按专家顺序和专家buffer中的token顺序排好的输入数据,
# 尺寸为(E, C, M)
# [Wi]: experts的Wi层, 尺寸为(E,M, H)
# [Wo]: experts的Wo层, 尺寸为(E, H, M)
# [expert_outputs]: experts的输出结果, 不含加权处理, 尺寸为(E, C, M)
# -------------------------------------------------------------------------------------
h = enisum("ECM, EMH -> ECH", dispatched_expert_input, Wi)
h = relu(h)
expert_outputs = enisum("ECH, EHM -> ECM", h, Wo)
# -------------------------------------------------------------------------------------
# 5. 最后, 进行加权计算, 得到最终MoE-layer层的输出
# -------------------------------------------------------------------------------------
outputs = enisum("SEC, ECM -> SM", combine_weights, expert_outputs)
outputs_reshape = outputs.reshape(input.shape) # 从(S, M)变成(seq_len, batch_size, M)
MoE并行训练¶
EP + DP¶
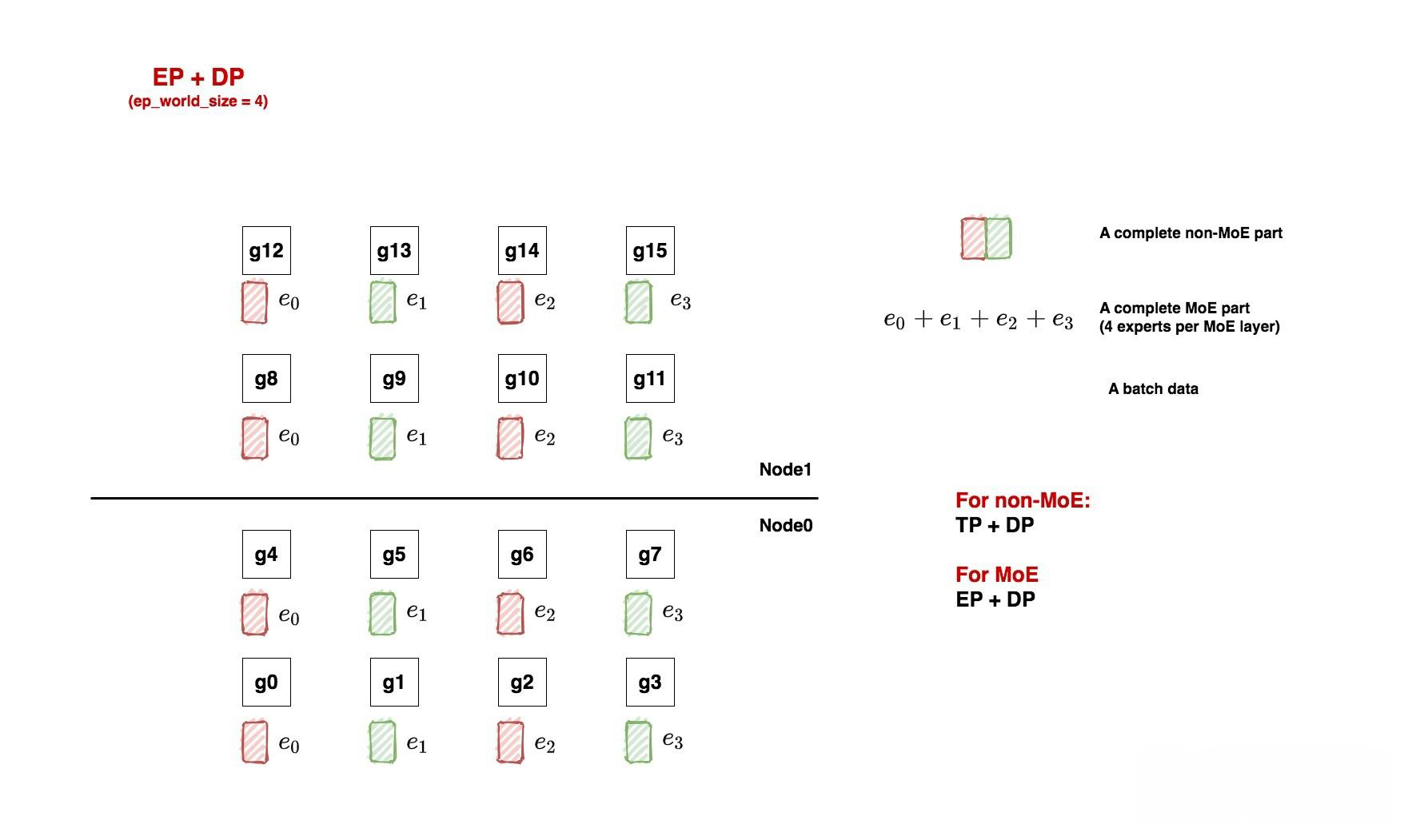
- 如上图, 我们先来看一个例子. 在本例中, 我们共有16块GPU:
- 对于non-moe的部分, 采取tp + dp并行
- 对于moe部分, 采取ep + dp并行
Non-MoE: tp + dp¶
- non-moe的部分指模型中Attention, word embedding层等. tp + pp 的并行方式我们也很熟悉了, 根据图中所示, 我们有:
tp_world_size = 2
tp_groups = [
[g0, g1],[g2, g3], [g4, g5], [g6, g7],
[g8, g9],[g10, g11],[g12, g13],[g14, g15]
]
dp_world_size = 8
dp_groups = [
[g0, g2, g4, g6, g8, g10, g12, g14],
[g1, g3, g5, g7, g9, g11, g13, g15]
]
pp_world_size = 1
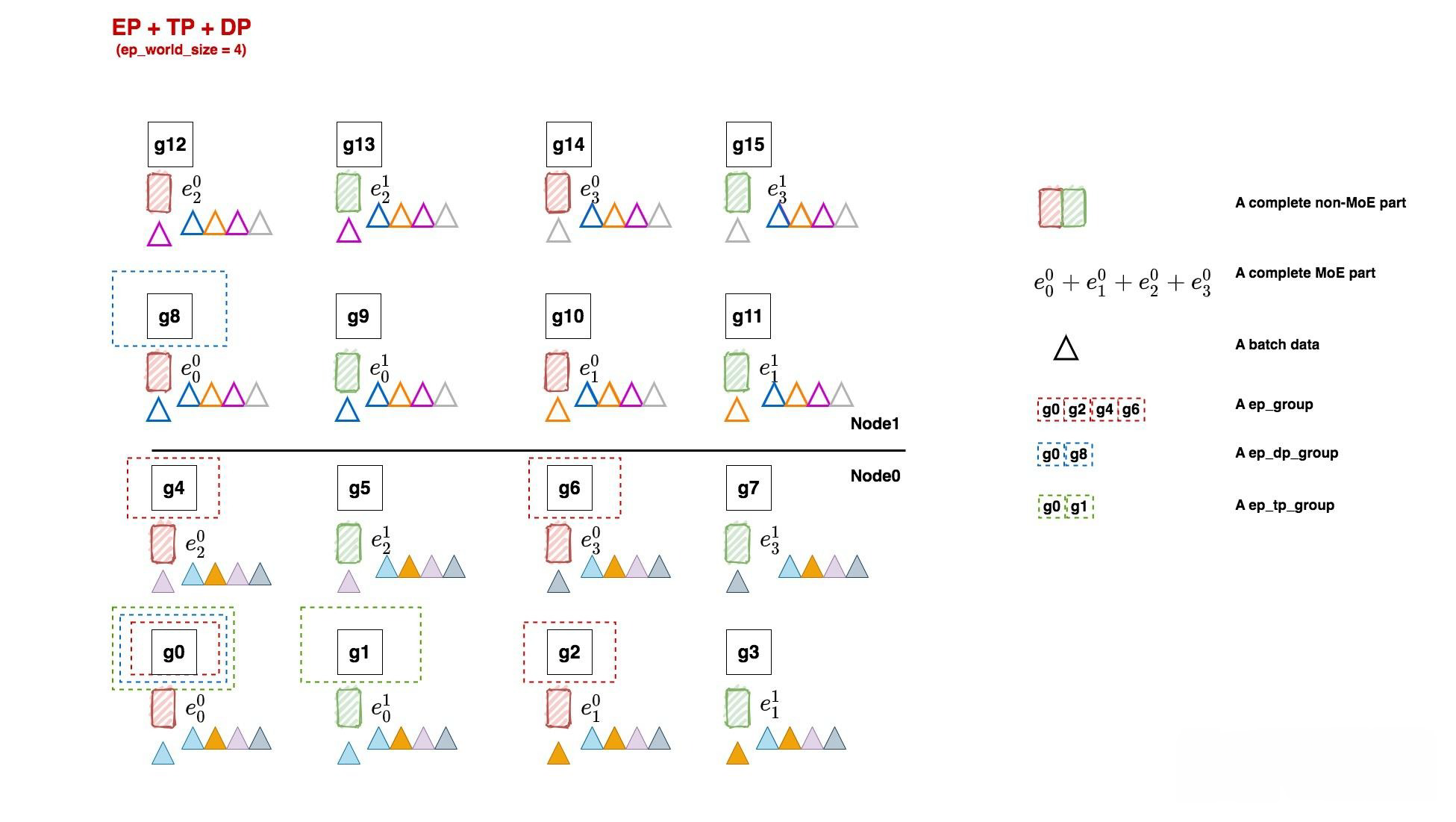
MoE: ep + dp¶
- 当我们安排好non-moe的部分后, 我们就可以开始考虑要怎么安排MoE层了, 这里我们先给出划分方法, 然后再对其进行详细解释:
ep_world_size = 4
ep_groups = [
[g0, g1, g2, g3 ],
[g4, g5, g6, g7],
[g8, g9, g10, g11],
[g12, g13, g14, g15]
]
ep_dp_world_size = 4
ep_dp_groups = [
[g0, g4, g8, g12],
[g1, g5, g9, g13],
[g2, g6, g10, g14],
[g3, g7, g11, g15]
]
ep_tp_world_size = 1
- 前面我们说MoE层采用的是EP + DP并行吗? 那么这里的EP和DP的定义到底是什么呢?
- 假设我们每个MoE层有若干个专家(我们统称其为一套专家), 现在我们想把这一套专家分布排列到gpu上, 最直觉的做法就是: 我们先定好要用几块GPU装下一套专家(EP), 进而我们就能确认全局上共有多少套专家副本在跑(DP). 通过这种简单的方式, 我们就做好了EP + DP形式的MoE层初始化.
- 回到我们的例子中, 一共16块GPU:
- ep_world_size = 4: 表示我们希望用4块GPU装下一套完整的专家, 确定这个数值后, 我们就能确认ep_groups
- local_expert_num: expert_num / ep_world_size, 其中expert_num表示每层专家的总数. 假设每层专家数量是4, 那么1块gpu上就放一个专家; 假设每层专家数量是8, 那么1块gpu上就放2个专家. 所以图中的e0等符号并不绝对表示这里只有1个专家, 只是对local_expert的统称.
- ep_dp_world_size: 类比于non-MoE层, MoE层同样也有数据并行的概念. 例如图中[g0, g4, g8, g12]上都维护着e0, 所以它们构成一个ep_dp_group. 这个group的作用是当我们在计算backward时, 它们之间是需要做梯度的allreduce通讯的, 我们会在下文详细图解这一点. 另外需要注意的是, 构成ep_dp_group的条件不仅是e相同, 还需要每个e吃的batch的数据不同(类比于一个普通的dp_group, 组内的每张卡吃的是不同的小batch). 现在你可能无法具象化感受这点, 我们在后文将ep + tp + dp并行的时候再细说.
- ep_tp_world_size: 类比于non-MoE层, MoE层同样也有张量并行的概念, 即一个专家可以纵向切割成若干份, 本例中我们不对专家做tp操作, 在后文我们会详细来看做了tp操作的相关例子.
- FWD和BWD过程, 如下图所示:
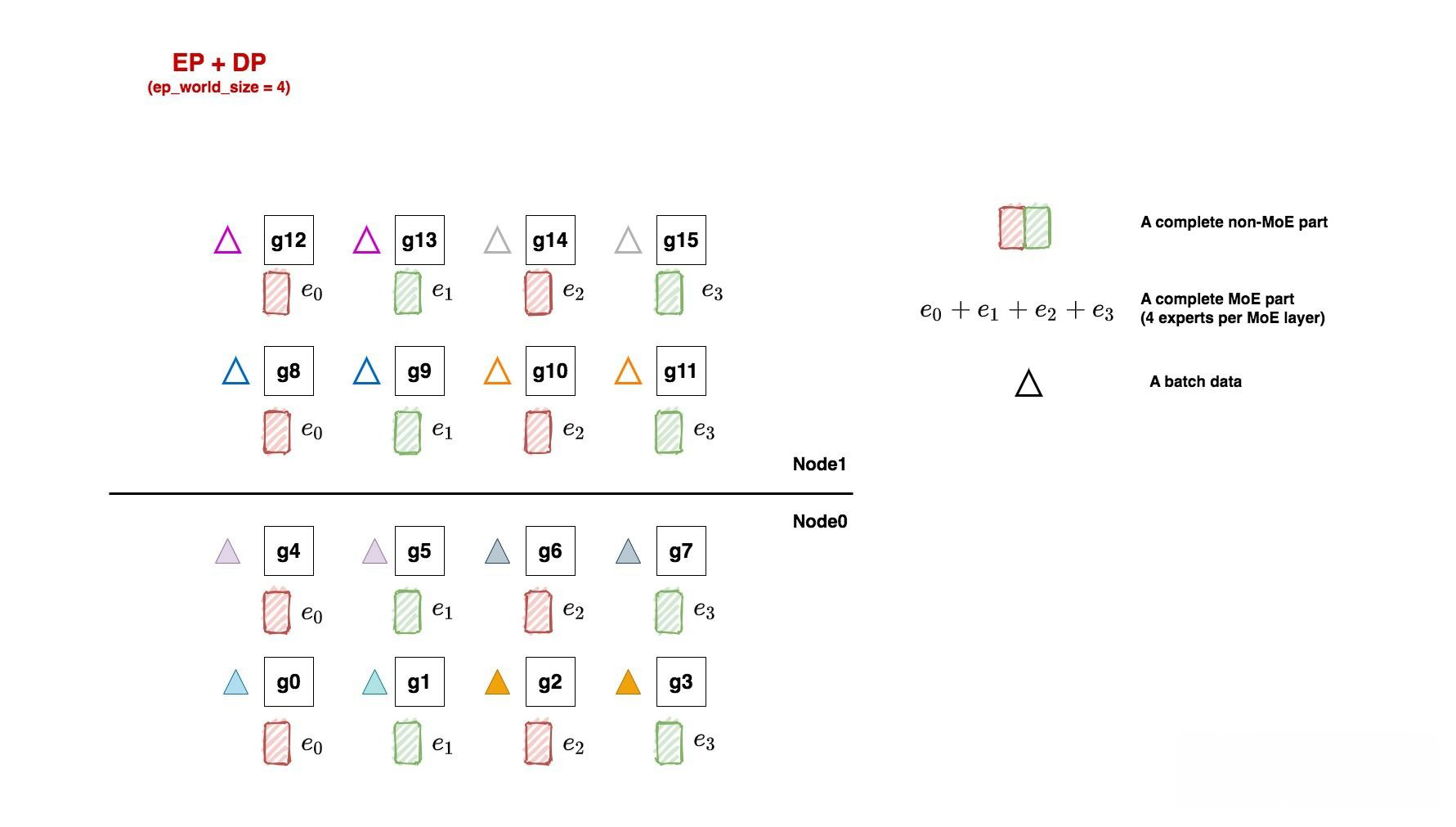
- 如图, 三角形表示1个batch的数据, 这里我们共喂给模型8个batch. 每个tp组内的输入数据一致, 所以它们对应的三角形颜色也相同.
- 让我们牢记分布式并行的使命: 分布式训练效果应与单卡(假设这个单卡能装下一个完整的模型)的训练效果一致!!!放到我们的例子里, 16卡吃8个小batch做完FWD + BWD后的结果, 应该与单卡吃下由这8个小batch组成的大batch的结果一致.
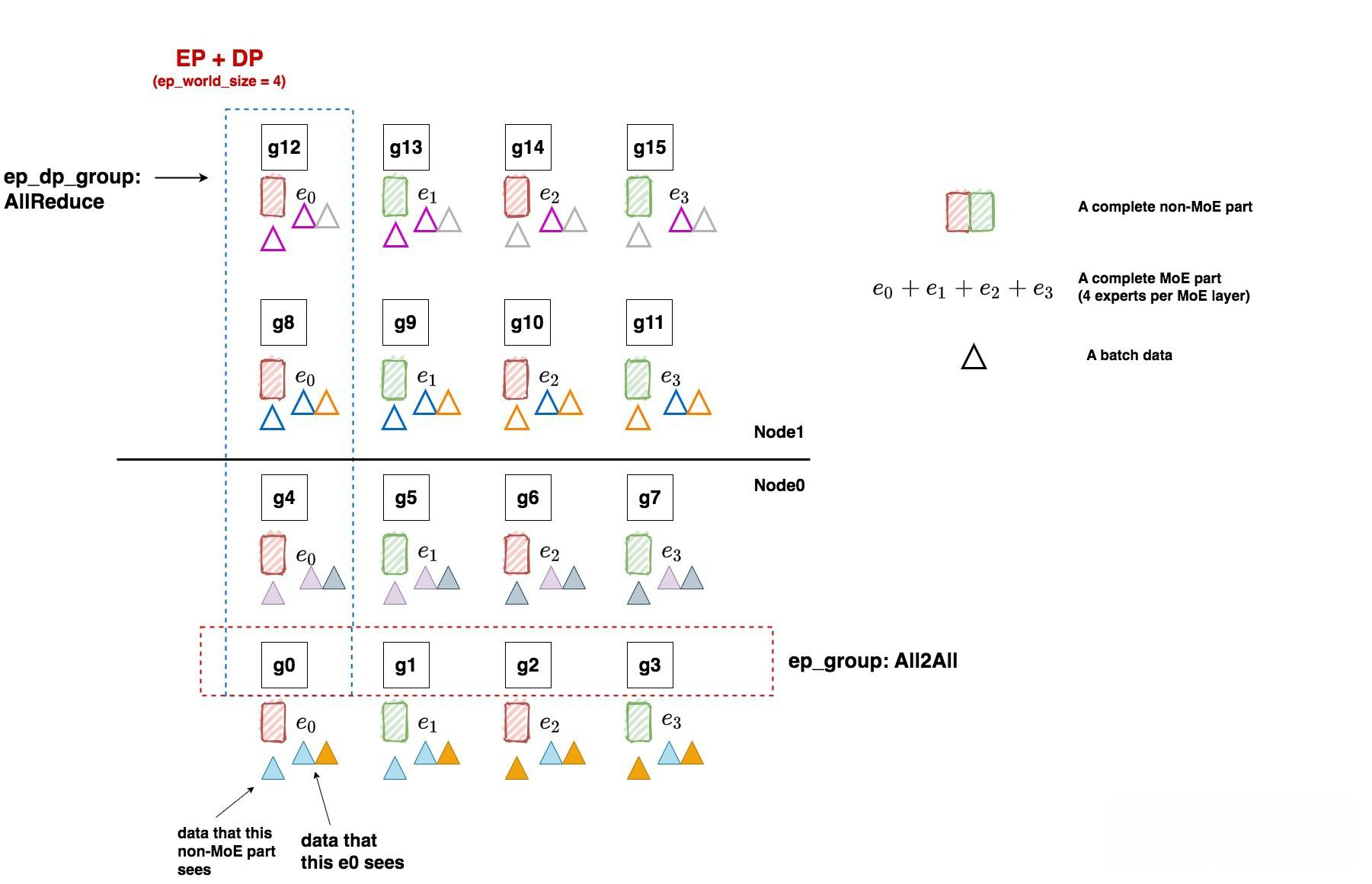
- 现在开始做FWD与BWD, 过程如下图:
- 1: 在FWD中, 数据先过non-MoE(Attention)层, 由于一个tp组内每块卡的输出也是一致的, 因此三角形颜色的分布没有改变. 我们把三角形移动到对应的non-MoE分块下, 表示在整个FWD中对应的non-MoE分块见过的batch.
- 2: 继续做FWD, 现在数据来到了MoE层, 我们前面说过, 每块卡上数据的维度是(E, C, M), 即我们已经计算好token和专家的对应关系, 我们只需在ep_group内做all2all通讯, 将token发送去对应的专家即可, 这就是ep_group的作用. all2all通讯的细节我们放在后面说, 这里只需记住在all2all通讯后, ep_group内每个专家见过的batch有了改变, 例如对e0, 现在它见过了蓝色和橘色两个batch的数据. 每个专家计算完自己的结果后, 再通过all2all的方式, 将对应的token计算结果还给ep_group内的各gpu, 然后继续mon-MoE -> MoE的步骤, 直到FWD完毕.
- 3: 做完了FWD, 进入BWD. 我们首先来到MoE部分, 以e0为例, 根据分布式训练使命, 我们应该allreduce8个batch的梯度结果, 用来更新e0. 那这8个batch在哪里呢? 当然是在图中的ep_dp_group内. 所以在BWD过程中, 我们对ep_dp_group中e0的梯度做allreduce, 用来更新e0. 现在, 你是不是更好理解ep_group的作用了!
- 4: 继续做BWD, 数据来到了non-MoE部分, 这块对梯度的通讯我们在Megatron解析中已经讲了很多, 这里就不再说明了.
EP + DP + TP¶
Non-MoE与MoE¶
- 现在我们再回到ep并行设置的例子上来, 我们考虑对专家也做tp切分. 实现这一点最简单的逻辑是让专家的tp切分方式和非专家的tp切分方式一致, 这样省得我们再去对MoE层多写一套tp组的分布式设置:
- non-MoE组的并行设置和3.1一致, 这里不再介绍, 我们来看看MoE组的并行设置:
ep_world_size = 4, 保持和3.1一致
ep_groups = [
[g0, g2, g4, g6],
[g1, g3, g5, g7],
[g8, g10, g12, g14],
[g9, g11, g13, g15]
]
ep_dp_world_size = 2
ep_dp_groups = [
[g0, g8],
[g1, g9],
[g2, g10],
[g3, g11],
[g4, g12],
[g5, g13],
[g6, g14],
[g7, g15]
# 复用non-MoE tp相关的并行设置
ep_tp_world_size = 2
ep_tp_groups = [...]
- ep_groups: 在前面我们提过, 每个ep_groups中的每个ep_group装下一套"完整的"专家, 但我们也留了个坑, 说明"完整"的含义需要留后讨论, 现在我们就来看看这个坑:
- 在deepspeed中, 虽然每个ep_group内的专家都是被纵向切开的, 但只要它涉及到所有的专家, 就认为它是"完整的".
- 在Megatron中, "完整"的含义就是参数完整, 即g0~g7才被认为是一个ep_group.
- 定义不同, 组内的通讯方式自然也不同. 在deepspeed的定义下, ep_group内做的是all2all; 在megatron的定义下, 做的是ReduceScatter和AllGather(事实上Megatron的MoE实现就没有用到all2all). 这一点我们在源码讲解篇会来做比较. 这里我先抛出我的结论: 我认为deepspeed的ep_group设计是较好的, 不仅操作上更符合直觉认知, 还能避免重复数据发送(Megatron的实现方法会发送大量重复数据).
FWD与BWD¶
- 我们通过描述1次FWD与BWD的过程, 来说明各个group间是怎么运作的:
- 首先做FWD, 数据过non-MoE层, 因为采用了tp, 所以相同tp组内的各卡输出一致, 因此我们在图中将相同颜色的三角形放到对应的non-MoE参数块下.
- 继续做FWD, 数据来到了MoE层, 在例子中:
- ep_group[g0, g2, g4, g6]和ep_group[g1, g3, g5, g7]内都各做1次all2all, 将token发给对应的expert进行计算.
- 计算完毕后, 因为MoE层也是tp并行的, 因此[g0, g1], [g2, g3], [g4, g5], [g6, g7]这几个tp组各自通过AllReduce取得完整的输出结果.
- 然后ep_group[g0, g2, g4, g6]和ep_group[g1, g3, g5, g7]再做一次all2all, 把计算完毕的数据发送回去, 以便进入下一个non-MoE -> MoE操作. 我们在图中把这一步骤里各卡维护的expert所见过的batch数据画在对应的expert下面.
- 开始做BWD, 数据来到MoE层. 同一个ep_dp_group内的参数需要对梯度做AllReduce, 例如图中[g0, g8], 这个group维护了相同的e, 每个e都各自吃过4个batch的数据, 联合起来刚好构成全局上的8个batch(牢记前文分布式训练的使命).
- 继续做BWD, 数据来到non-MoE层, 来到大家熟悉的领域了, tp+dp模式下的BWD, 就不需要多说了吧.
Where is PP?¶
- 在上面的例子中, 我们见过了ep + tp + dp的混合, 你可能想问, pp也是一种常见的并行方式, 它去哪里了呢?
- 在MoE中, PP这个维度比较特殊, 大部分论文和开源代码实践中, 一般不考虑/不讨论再对MoE部分做pp切分. deepspeed中更是强制把PP维度设为1, 并在代码注释里表示不支持PP. 我个人认为, 如果tp+dp已经能满足显存限制的话, 就不需要再引入pp将模型切得更碎了. 同时在MoE模型中, 你会发现non-MoE的模型副本数和MoE的模型副本数是不一致的. 例如3.2的例子中, non-MoE有8个模型副本, 但是MoE只有两个模型副本(g0~g7, g8~g15), 却也能实现8个完整的non-MoE + MoE模型副本的分布式训练效果. 从这一点上看tp + dp形式的训练方式已经基本够用了.
- 但并不是说不能使用pp, Megatron中就支持pp的使用, 我们来看下引入pp后的情况:
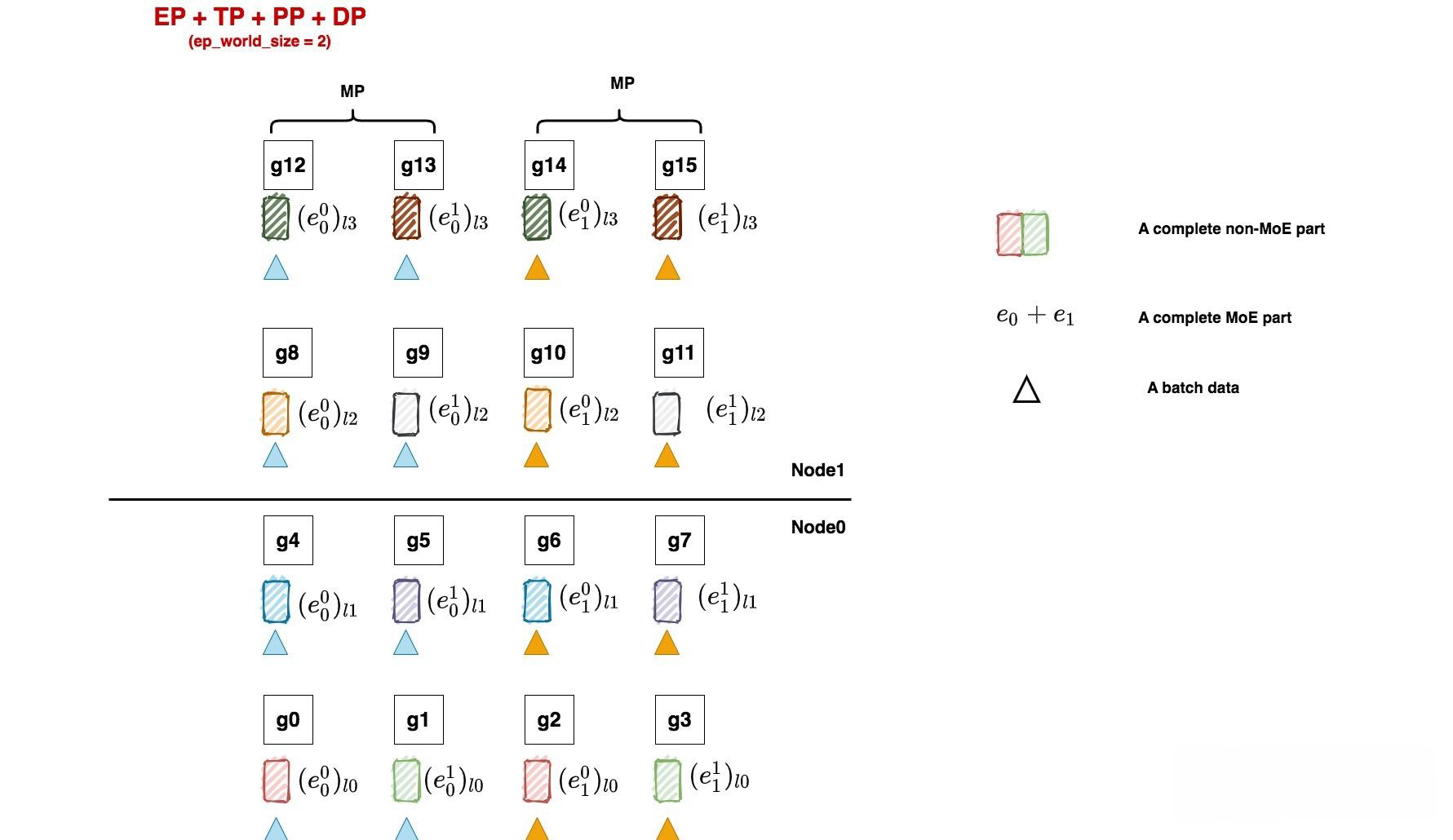
non-MoE层采用tp + dp +pp并行(就是我们在Megatron解读中举的例子, 是我们熟悉的味道).
MoE层采用ep + tp +pp + dp, 其中tp_group和tp_group直接复用non-MoE的设置.
- 相信通过之前的讲解, 大家已经能轻松看懂这张图了. 这里只强调三点:
- 1: ep_dp_groups = [[g0], [g1], [g2],...], 也就是每张卡单独组成了一个ep_dp_group(如果你觉得难以理解, 就用前面说的每个e见过的batch来分析看看)
- 2: ep_group = [[g0, g1, g2, g3], [g4, g5, g6, g7],...], 这个不难理解, 想想上文说的Megatron对"完整的一套专家"的定义. 这里特别说明下, 你可能已经发现ep_world_size = 2, 但这里每个ep_group占四块卡, 这在Megatron中是正常的. 在下篇源码解读中, 我们会来看Megatron这样设计的意义.
- 3: 需要满足dp_world_size % ep_world_size == 0, 事实上这也是Megatron并行设置的前置条件(不管你有没有使用pp, 因为Megatron强制MoE复用non-MoE的并行配制, 在此基础上再引入和ep相关的并行). 一般而言, world_size = tp_world_size * pp_world_szie * dp_world_szie, 如果你的MoE层复用了non-MoE的tp和pp, 那么ep_world_size只能在dp_world_size上做切割了.